Model | M-710iC/12L | M-710iC/20L | M-710iC/20M |
Mechanism | Articulated Robot |
Number of controlled axes | 6-axis (J1、J2、J3、J4、J5、J6) |
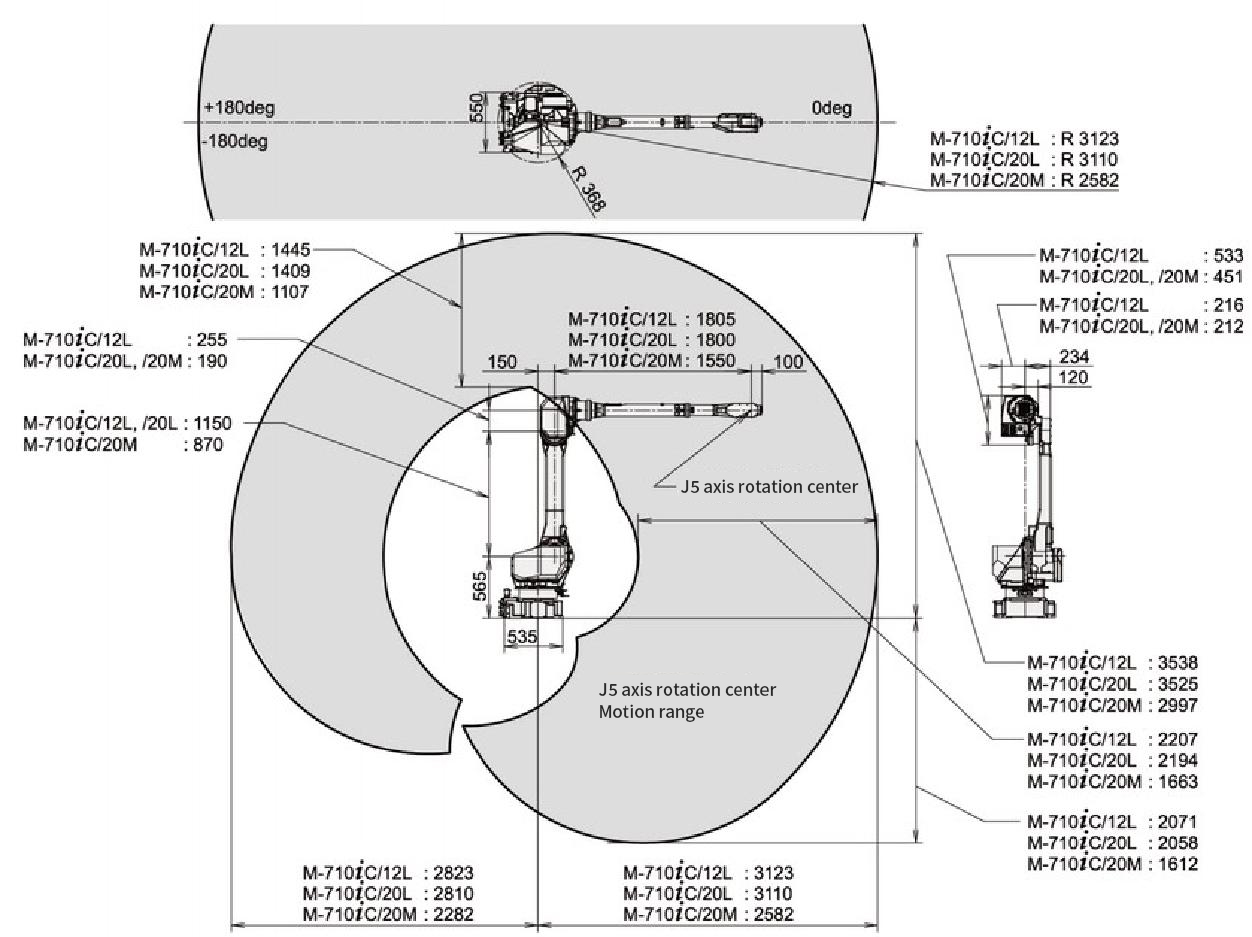
Reachable radius | 3123 mm | 3110 mm | 2582 mm |
Installation method (Note 1) | Ground installation, ceiling installation, tilt angle installation |
Range of motion (maximum speed) (Note 2) | J1 axis rotation | 360°(180%s)
6.28 rad (3.14 rad/s) | 360°(175/s)
6.28 rad (3.05 rad/s) | 360°(175%s)
6.28 rad (3.05 rad/s) |
J2 axis rotation | 225°(180%s)
3.93 rad (3.14 rad/s) | 225°(175%s)
3.93 rad (3.05 rad/s) | 225°(175/s)
3.93 rad (3.05 rad/s) |
J3 axis rotation | 434°(180/s)
7.57 rad (3.14 rad/s) | 432°(180%s)
7.54 rad (3.14 rad/s) | 435°(180%s)
7.59 rad (3.14 rad/s) |
J4 axis wrist rotation | 400°(400/s)
6.98 rad (6.98 rad/s) | 400°(350/s)
6.98 rad (6.11 rad/s) | 400°(350/s)
6.98 rad (6.11 rad/s) |
J5-axis wrist swing | 380°(430%)
6.63 rad (7.50 rad/s) | 280°(360%s)
4.89 rad (6.28 rad/s) | 280°(360%s)
4.89 rad (6.28 rad/s) |
J6 axis wrist rotation | 720°(630/s)
12.57 rad (11.0 rad/s) | 900°(600/s)
15.71 rad (10.47 rad/s) | 900°(600/s)
15.71 rad (10.47 rad/s) |
Wrist load capacity | 12 kg | 20 kg |
J3 Shell Portable Mass (Note 3) | 24 kg |
Wrist allowable load torque | J 4 axis | 22.0 N ·m 2.24 kgf m | 39.2 N ·m 4.0 kgf m |
J5 axis | 22.0 N ·m 2.24 kgf ·m | 39.2 N ·m 4.0 kgf ·m |
J6 axis | 9.8 N ·m 1.0 kgf m | 19.6 N ·m 2.0 kgf ·m |
Wrist allowable load Moment of inertia | J4 axis | 0.65 kg ·m²6.6 kgf cm · s² | 0.88 kg ·m²9.0 kgf cm · s² |
J5 axis | 0.65 kg ·m26.6 kgf cm · s2 | 0.88 kg ·m²9.0 kgf ·cm · s² |
J6 axis | 0.17 kg ·m²1.7 kgf cm · s2 | 0.25 kg ·m²2.5 kgf cm · s² |
Drive mode | Electrical servo drive using AC servo motors |
Repeatability (Note 4) | ±0.06 mm |
Robot quality (note 5) | 540 kg | 530 kg |
Installation conditions | Ambient temperature: 0~45℃ Ambient humidity: usually below 75%RH (no condensation) Short term below 95%RH (within 1 month) Vibration acceleration: below 4.9m/s²(0.5G) |
Note 1) When the tilt angle is installed, the range of motion of the J1 and J2 axes is limited.
Note 2) The maximum speed may not be reached when moving a short distance.
Note 3) The transportable mass of the J3 housing is limited by the mass of the wrist load.
Note 4) The measurement results are in accordance with ISO 9283 "Industrial Robot Performance Specifications and Test Methods".
Note 5) The mass of the control device is not included.
|