Project | P-250iB |
Mechanism | Multi-jointed robot |
Number of controlled axes | 6 axes (J1, J2, J3, J4, J5, J6) |
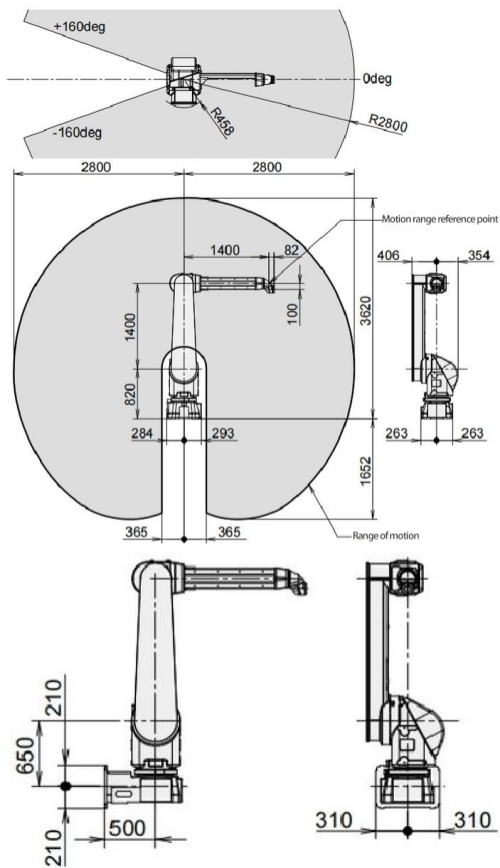
Reachable radius | 2800 mm |
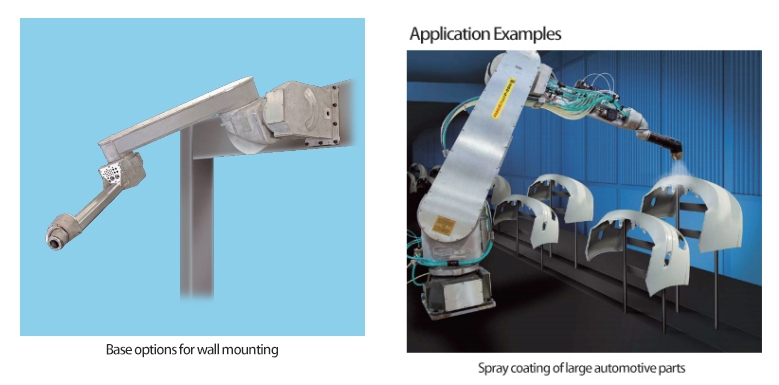
Installation | Ground installation, ceiling installation, high platform installation | Wall mounting, tilt angle mounting |
Range of motion (maximum speed) (Note 1) | J1 axis rotation | 320°(160°/s)
5.59 rad(2.79 rad/s) | 320°(100°/s)
5.59 rad (1.75 rad/s) |
J 2-axis rotation | 280°(160/s) 4.89 rad (2.79 rad/s) |
J3 axis rotation | 330° (160/s) 576 rad (2.79 rad/s) |
J4 axis wrist rotation | 1080°(375°/s) 18.85 rad (6.54 rad/s) |
J5-axis wrist swing | 1080° (430°/s) 1885 rad (7.50 rad/s) |
J6-axis wrist rotation | 1080°(545°/s) 18.85 rad (9.51 rad/s) |
Wrist load capacity | 15 kg |
J2 arm can carry mass | 15 kg |
J3 arm can carry mass | 15 kg |
Wrist allowable load torque | J 4 axis | 65 N ·m 6.6 kgf m |
J5 axis | 55 N ·m 5.6 kgf ·m |
J 6 axis | 7.4 N ·m 0.76 kgf ·m |
Wrist allowable load Moment of inertia | J 4 axis | 3.0 kg ·m²30.6 kgf cm · s² |
J5 axis | 2.1 kg ·m²21.4 kgf cm · s2 |
J 6 axis | 0.07 kg ·m²0.71 kgf cm · s2 |
Drive mode | Electrical servo drive using AC servo motors |
Repeat positioning accuracy | ±0.2 mm |
Robot mass (Note 2) | 530 kg 500 kg |
Installation conditions | Ambient temperature: 0~45℃ Ambient humidity: usually below 75%RH (no condensation) Short term below 95%RH (within 1 month) Vibration acceleration: below 4.9 m/s² (0.5G) |
Can be used with a rotating cup | The electrostatic voltage is 90,000 volts and the speed is 80,000 rpm. |
Note 1) When moving a short distance, the maximum speed of each axis may not be achieved. |
Note 2) The mass of the control device is not included. |