Process advantages:
The process equipment used to control the spray gun can be installed on the robot's horizontal arm and closer to the sprayer, giving it fast, precise response speed and efficiency.
Optional proportional valves and solenoid valves can be installed in the horizontal arm to achieve faster response processing.
"Flip-over" performance provides a larger working range.
Equal arm length design, larger effective working range.
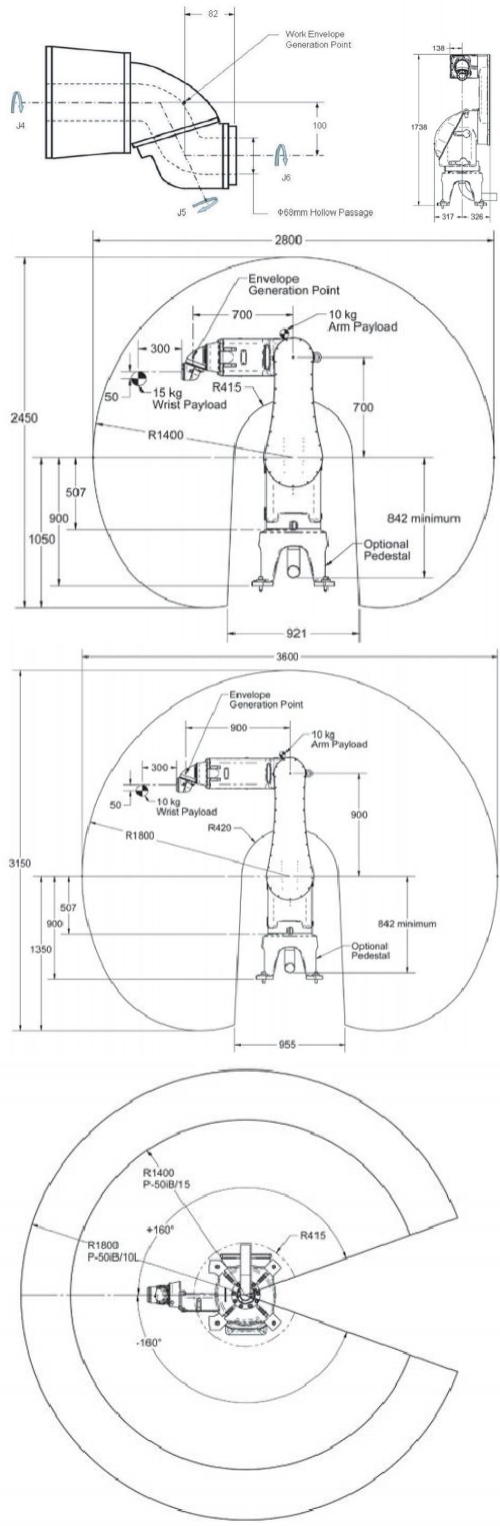
Two arm lengths are available:
①, -700mm vertical arm & 700mm horizontal arm 15KG load-P-50iB/15
②, -900mm vertical arm arm & 900mm horizontal arm 10KG load-P-501B/10L
R-301AMate controller is compact and has a powerful processor.
Hollow wrist can be used for compact and demanding process requirements.
Software advantages:
PaintTOOL software provides a powerful and convenient application operation program interface in the spraying industry.
Dual Check Safety software can make the spray room smaller and the system cost lower.
Highly sensitive anti-collision detection can protect robots and peripherals.
Accuflow software detects flow in real time and enables closed-loop control.
Embedded process parameter diagnostic monitoring provides accurate, real-time process data feedback.
Supports multiple network communication protocols.
Supports ROBOGUIDE Paintpro 3D offline programming software.
Supports color screen teaching device.
P-50iB/15 FANUC standard base (optional)
Floor mount, wall mount, any angle mount and ceiling mount configuration.
Features and benefits:
Conveniently configured on the left or right arm in the spray booth
The main body design is easy to maintain and key components are easy to remove
High-strength arm and wrist load-bearing capacity supports a variety of applications, including bell, traditional spray guns, electrostatic spray guns and multi-gun configurations
Multiple mounting options can integrate flexible applications in the spray booth
Allows use in hazardous areas, see specifications for details
Supports floor mount, wall mount, ceiling mount and any angle mount