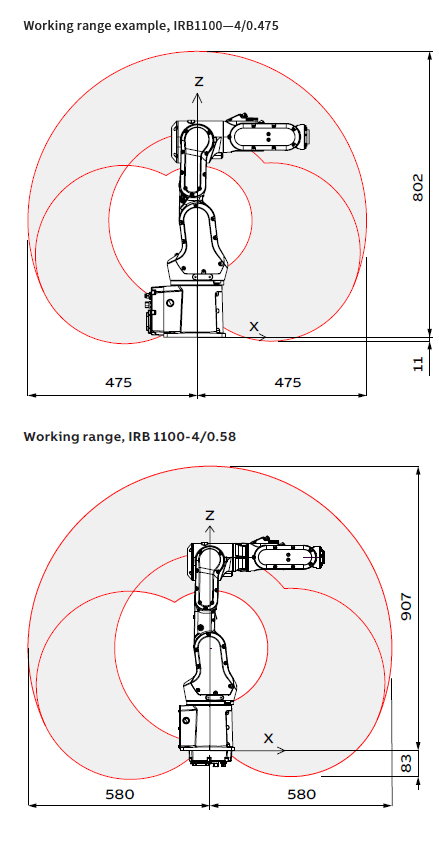
The RB 1100 further expands ABB's small robot portfolio, increasing productivity by 35% and reducing footprint by10%Outstanding performance, high-quality productionDesigned to improve manufacturing productivity, the IRB 1100 can reduce cycle time by 35%, while ensuring high-quality manufacturing with leading repeatability.Compared to similar robots, the IRB 1100 delivers higher payload and repeatability (RP) even in limited spaces. In fact, the IRB 1100 has the highest payload in its class.Compact and flexible installationCompared to previous generations of robots, the IRB 1100 robot design has been optimized to take up 10% less space and weigh more than 20% less, allowing it to be installed in a variety of production environments such as electronics manufacturing plants, achieving efficient use of space.The small footprint means that multiple robots can be deployed simultaneously to perform automated operations in collaboration, and more flexible heavy-load operations can be achieved with complex tools/end effectors.IRB 1100 supports ABB's new OmniCore™ controller with advanced motion control functions, making it ideal for fast assembly, pick and place and material handling.ABB will also launch a cleanroom version of IRB 1100 in the future. In addition, the IRB 1100 robot is available in two models: one with a load capacity of 4 kg and a working range of 475 mm; the other with a load capacity of 4 kg and a working range of 580 mm.

Main advantages:
· Offers 35% faster cycle times for increased productivity
· 10% smaller footprint, more than 20% lighter weight, flexible and easy installation
· Highest payload among similar robots
· Up to 16 inputs/outputs for more sophisticated applications
Main applications:
· Assembly and testing
· Loading and unloading
· Screwing
· Inserting rubber