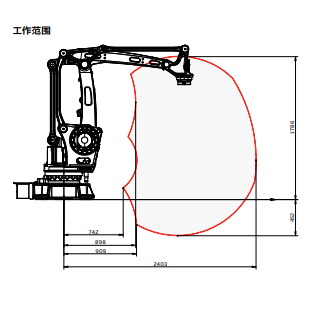
Robot Model | Working scope(m) | Load(kg) | Arm load(kg) |
IRB 460-110/2.4 | 2.4 | 110 | |
Number of axes | 4 |
Protection level | IP67 |
Installation | Floor-standing |
Controller | IRC5 single cabinet, OmniCore V250XT |
Integrated signal source | Optional |
Integrated air source | Optional |
Performance (based on ISO 9283 standard) |
| Repeat positioning accuracy | Repeat path accuracy |
IRB 460 | 0.2mm | 0.11 mm |
Technical Information |
Electrical Connections | |
Supply voltage | 200-600V,50-60Hz |
Power consumption | ISO cube 3.67 kW |
Physical properties | |
Robot base size | 1007x720mm |
Robot weight | 925 kg |
Environment |
Mechanical part ambient temperature | |
During operation | 0°C (32°F) to +45°C (113°F) |
During transportation and storage | -25°C(-13°F) to +55°C (131°F) |
Short-term (no more than 24 hours) | Max. +70°C (158°F) |
Relative humidity | Up to 95% |
Noise Level | <70 dB(A) |
Safety performance | Dual circuit with monitoring, emergency stop and safety functions, 3-position enabling device |
Sports | | | |
Axis movement | Working scope | Top speed |
Axis 1 rotation | +165° to -165° | 145°/s |
Axis 2 Robotic Arm | +85° to -40° | 110°/s |
Axis 3 Robotic Arm | +120° to -20° | 120°/s |
Axis 6 flip | +300° to -300° | 400°/s |
Safety | |
Basics | Safety emergency stop Dual channel safety circuit 3 position starter with monitoring function |
Electronic limit switch | 5 safety outputs (monitoring axes 1-7) |
SafeMove | Standstill, speed, position and direction monitoring (robot and additional axes) 8 safety inputs (function enabled) 8 monitoring outputs |
Mechanical interface | |
Input/Output | Up to 4096 signals |
Number | 24V DC or relay signal |
Simulation | 2x0-10V |
Serial Port | 1xRS 232/RS 422 |
Network | Ethernet (10/100 MB/S), service channel and LAN channel |
Dual Channel | PROFINET
PROFIBUS DP
EtherNeMPM
DeviceNet™ |
Fieldbus Master | PROFINET
PROFIBUS DP
EtherNetP™
Interbus
Allen-Bradley Remote I/O
CC-Link |
Process Encoder | Up to 6 channels |
Process interface | Robot upper arm signal interface
Control cabinet reserves space for additional equipment
|
Sensor interface | |
Search stop (automatic program switching) Weld seam tracking Contour tracking Conveyor chain tracking Machine vision system force control |
Data and dimensions subject to change without notice. |
Security | |
Basics | Safety stop, emergency stop 2-channel safety circuit monitoring 3-position start device |
Mechanical interface | |
Input/Output: | Standard 16/16 (up to 8192) |
Number: | 24VDC or relay signal |
Simulation: | 1*0-10V |
Serial Channel: | 1xRS232 (RS422 with adapter) |
Network | Ethernet (10/100 MB/s) |
Two channels: | Services and LAN |
Fieldbus(Master): | DeviceNetP
ROFINET
PROFIBUS DP
Ethernet/IP™ |
Fieldbus (slave): | PROFINET
PROFIBUS DP
Ethernet/IPM
Interbus
Allen-Bradley Remote I/O
CC-Iink |
Processing encoder | Up to 6 channels |
Sensor interface | |
Search stop (with automatic program switching)
Conveyor chain tracking Machine vision system Weld seam tracking
|
Data and dimensions are subject to change without prior notice |