IRB 1200 can fully display its working range and performance advantages in a small space. The short moving distance between two actions can not only shorten the shooting time, but also help minimize the size of the workstation. It can be said to be a design model that wins by being small and leads the industry.
ABBIRB 1200-7/0.7Multi-purpose small robotReduces equipment space and speeds up workThis robot maintains the advantage of a wide working range while meeting the requirements of flexibility, pace, ease of use and compactness in material handling and loading and unloading.

Small, fast and versatile industrial robot
Have you ever thought about making your production equipment 15% smaller and 10% faster? The answer lies in the ABB IRB 1200 robot. Specifically, this robot meets the requirements of flexibility, ease of use, compactness and rhythm in the material handling and loading and unloading industries while maintaining the advantage of a wide working range.
As a robot series, IRB 1200 offers two models that are widely suitable for various operations. Both models can be equipped with food-grade lubrication, SafeMove2, Foundry Expert II and clean room protection. The two models have a working range of 700mm and 900mm respectively, and a maximum payload of 7kg and 5kg respectively.
New design, optional SafeMove2 and food-grade lubrication
SafeMove2:
IRB 1200 SafeMove2 is ABB's smallest robot equipped with advanced safety-certified monitoring software. SafeMove2 strictly limits the robot's movements to those required for specific applications, allowing the robot and operator to work more closely together.
Food Grade Lubrication:
The food grade lubrication (NSF H1) option includes cleanroom ISO Class 3 and IP67 protection, ensuring safe and hygienic food and beverage applications. The cleanroom ISO 3 design avoids contamination in food handling areas.
Features and Benefits
· 15% smaller workstation, 10% shorter cycle time
· Optional food grade lubrication
· Optional SafeMove2
· IP40 protection as standard; cleanroom, IP67 and Foundry Expert II protection as options
· 4 air lines, 10 user signal lines and Ethernet lines, all internally routed from wrist flange to base
· Available in two models: 700 mm reach/7 kg payload and 900 mm reach/5 kg payload
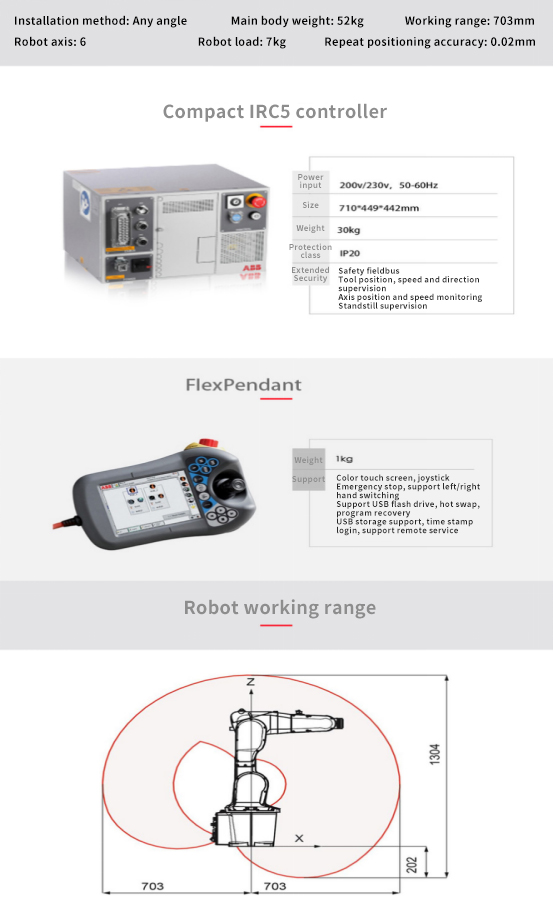
· Can be mounted at any angle
· Compact body with large effective working range